Электрические двигатели, в том числе трехфазные асинхронного типа, получили широкое распространение в разнообразных сферах деятельности. Рабочий цикл агрегатов связан с плавным их запуском и аналогичным способом остановки. Для решения проблемы управления частотой тока и скоростью двигателя применяются частотные преобразователи.
Назначение и достоинства
Электромагнитные силы, образующиеся под влиянием магнитного поля, создаваемого якорной обмоткой, приводят ротор в движение. Его вращение происходит с числом оборотов, которое задается частотой сетевого тока. При частоте в 50 Гц происходит 50 колебаний в течение 1 с. Следовательно, скорость вращения ротора составит 3000 об./мин.








- Назначение частотных преобразователей состоит в том, чтобы посредством изменения параметров частоты тока обеспечить эффективное управление двигателем.
- Достоинствами этих приспособлений являются:
- обеспечение плавности работы мотора в момент пуска и торможения;
- регулирование работой двигателей, собранных в группу;
- отсутствие необходимости применения редукторов и иных механических устройств для управления скоростью движка;
- обеспечение работы систем управления приводами на многофункциональной основе;
- возможность корректировок в настойках без прерывания работы агрегата.
Разновидности устройств
В зависимости от конструктивных особенностей выделяют основные типы частотных преобразователей 220/380 – индукционные и электронные. К первому варианту относят асинхронные разновидности электрических двигателей, особенностью которых является применение схемы с фазным ротором.
При этом они имеют возможность работать в режиме генератора. Однако они не сильно распространены в практике, поскольку у них невысокий КПД и низкая эффективность.
- А вот электронный вариант может быть использован как при функционировании асинхронных движков, так и модификаций синхронного вида. Управление двигателями производится несколькими принципиально различающимися способами:
Посредством скалярного управления, исходя из линейных закономерностей. В этом случае учитывается пропорциональная зависимость амплитуды от частоты. Если частота меняется, то амплитуда входного напряжения также будет изменяться. В результате это влияет на крутящий момент, КПД, и уровень мощности.
Задание равномерности момента нагрузки обеспечивается постоянством соотношения амплитуды с выходной частотой. Преобразующее устройство и формирует указанное равновесие.
При векторном подходе момент нагрузки постоянен при любых пределах частотных изменений. Это позволяет получить большую точность регулирования. Возрастает и гибкость реагирования электропривода на скачки в выходной нагрузке. Частотный преобразователь для асинхронного двигателя обеспечивает постоянный контроль над моментом вращения.
Важно помнить, что фаза тока статора, которая меняется под действием магнитного поля, и представляет собой вектор тока. Он управляет моментом вращения. Таким образом, в этом случае используется амплитудная или широтно-импульсная система регулировки сигнала.
Конструктивное исполнение
Существуют разные виды частотных преобразователей для двигателя. Но при этом конструктивно можно выделить отдельные типичные блоки. Данные компоненты тесно связаны между собой. Блок управления определяет работу выходного каскада.
При этом определяющую роль играет возможность изменения параметров тока переменного типа. Дополнительно в устройстве предусматриваются системы защиты, находящиеся под контролем микроконтроллера.
Выпрямитель представляет собой первый модуль. Через него происходит движение тока. Здесь происходит изменение переменного тока. При помощи диодов он преобразуется в постоянный. Можно подобрать модели для однофазной сети или для трехфазного питания. В них будет отличаться число диодов.
Постоянное напряжение с высокими пульсациями выходит из выпрямителя. Чтобы сгладить пульсации применяются конденсатор и индуктивная катушка. А вот процесс преобразования параметров выходящего тока происходит в инверторе.
Конструктивно в нем содержатся транзисторы. Их 6 штук – по паре для каждой фазы. А микропроцессорная система гарантирует управление скоростными показателями роторного вращения. Все это можно увидеть на фото частотного преобразователя.
Особенности подключения
Устройства, предназначенные для управления частотой, могут функционировать в условиях подключении однофазного типа или за счет трехфазного электропитания. При эксплуатации источников постоянного тока, которые имеют напряжение в 220 В, то они могут также использоваться для подключения инверторов.
Модификации трехфазного типа ориентированы на сетевое напряжение 380 В. Они направляют его на двигатель. Питание однофазных инверторов ведется от сети 220 В. На выходе они создают три фазы, которые распределены по временному параметру.
Если вас интересует вопрос, как подключить частотный преобразователь, то можно выделить две принципиальные схемы. По принципу «звезда» обустраиваются обмотки под преобразователь, который подпитывается от сети с напряжением 380 В. Если же подключение идет к однофазной сети 220 В, то применяется схема «треугольник».
При этом следует учитывать параметр соответствия мощности двигателя с возможностями инвертора. Перегружать преобразователь нельзя. Наоборот, целесообразно иметь некоторый запас по мощности.
На первом этапе подключения перед устройством монтируется автоматический выключатель с номиналом, который совпадает с рабочими характеристиками тока, потребляемого двигателем. Если инструкция как настроить частотный преобразователь, была соблюдена полностью, то фазные проводники подведены к заданным контактам двигателя.
Преобразующее приспособление должно подсоединяться к контроллеру. Также требуется подключение и к пульту. Вначале проверьте положение рукоятки – нейтральное. Затем надо запустить автомат. При соответствии процесса нормативам наблюдается световая индикация.
Небольшой поворот рукоятки приведет к активизации вращения двигателя. Кнопка реверса позволяет задать обратное направление вращения. Чтобы настроить нужную частоту, следует произвести регулировку ручкой. В последующем работа преобразователя позволит более эффективно эксплуатировать оборудование с электродвигателем.
Фото частотных преобразователей
Источник: https://electrikmaster.ru/chastotnyj-preobrazovatel/
Самодельный частотник. Разрабатываем преобразователь вместе
Зачем нужно делать самому преобразователь для 3-фазного электромотора, и как смастерить его своими руками? Чтобы защитить окружающую природу повсюду создаются правила, которые рекомендуют изготовителям электрических устройств делать продукцию, которая будет экономить электрическую энергию. Часто это бывает достигнуто правильным управлением частотой вращения электромотора. Преобразователь частоты легко решает эту задачу.
Частотник электромотора с тремя фазами по-разному называют: инвертор, частотный изменитель тока, приводной механизм, регулируемый частотой. Сегодня такие устройства делают разные заводы, но многие умельцы своими руками изготавливают не хуже.
Как я сам изготовил частотный преобразователь
Я изготовил преобразователь частоты и асинхронный привод для моего товарища. Ему нужен был привод для пилорамы, мощный и хороший. Так как я любил заниматься электроникой, то сразу предложил ему такую схему:
Трехфазный мост на транзисторах с диодами обратной связи я использовал, которые имелись. Управление осуществил через оптодрайвер HCPL 3120 микроконтроллером PIC16F628A.
У входа припаял гасящую емкость, чтобы электролиты заряжались плавно. Затем припаял шунтовое реле. Еще установил триггер защиты тока от замыкания и перегрузки.
Для управления установил две кнопки и выключатель для обратного вращения.
Силовую часть я собрал на навесном монтаже.
Резисторы, соединил параллельно по 270 кОм с помощью затворных проходных конденсаторов, позади платы их напаял. Моя плата показана на внешнем виде:
Вид этой моей платы с другой стороны:
Для подключения питающего напряжения я собрал блок питания, работающий на импульсах, обратноходовой. Вот привожу схему этого блока питания:
Как я запрограммировал микроконтроллер? Простые моргалки для меня не представляли какой-то проблемы. Получились константы в виде матрицы, над которой работал мой контроллер. Частота и напряжение были заданы этими величинами. Всю схему работы проверил на моторчике вентилятора небольшой мощности, 200 Вт. Эта моя конструкция выглядела так:
Начальные эксперименты дали хороший результат. Затем доработал программу. Раскрутил двигатель на 4 кВт, и пошел собирать управление пилорамой.
При монтаже у нас с товарищем случайно произошло замыкание и сработала защита, проверили ее работу. Мотор на 2 кВт 1500 оборотов с легкостью пилил доски.
Сейчас программа еще дорабатывается для раскрутки двигателя выше номинала.
Характеристики: частота от 2 до 50 герц с шагом 1,5 герц, синхронная частота, постоянно меняется, разбег от 1500 до 3500 герц, управление скалярного типа U/F, мощность мотора до 5 кВт.
Удерживаем кнопку RUN и разгоняем двигатель. Отпускаем, частота держится на уровне. Когда загорается светодиод, то привод готов к запуску.
Как сделать инвертор самому своими руками?
Вместе с производством заводских инверторов любители делают их сами, своими руками. Здесь нет ничего сложного. Такой преобразователь частоты преобразовывает одну фазу, делает из нее три фазы. Электродвигатель с похожим частотником используют в домашних условиях, мощность его не будет теряться.
Блок выпрямления в схеме расположен в начале. Далее идут фильтры, которые отсекают токовые переменные. Чтобы изготовить данные инверторы применяют транзисторы IGBT.
За тиристорами стоит будущее, хотя и в настоящем они уже применяются давно. Купленный частотник на биполярных транзисторах стоит дорого и мало где применяется (сервоприводы, металлорежущие станки с векторным управлением).
Эти приводы как транспортеры и конвейеры, карусельные станки, станции подкачки воды, климатические системы управления — это большая часть от всего применения устройств заводов, где лучше использовать частотники для управления электромоторами с короткозамкнутыми якорями и можно делать управление оборотами двигателя, если подать потенциал, изменяя частоту до 50 герц.
Приведем простые примеры частотных преобразователей, которые тянули мощные электродвигатели тепловозов и электричек, имеющих в своем составе много вагонов товарных платформ, большие станции с насосами напряжением 600 вольт, обеспечивающие городские районы питьевой водой.
Очевидно, что данные сильные электродвигатели не подойдут на биполярных транзисторах. Поэтому применяют активные тиристоры типа GTO, GCT, IGCT и SGCT. Они преобразуют из постоянного тока токовую сеть с тремя фазами с хорошей мощностью.
Однако, имеются простые схемы на тиристорах простого типа, закрывающиеся током катода обратного. Такие тиристоры не будут действовать в режиме ШИМ, их хорошо применяют в прямой регулировке электромоторов, без тока постоянного размера.
Преобразователи частоты на тиристорах в застойные времена были задействованы для моторов на постоянном токе. Фирма Сименс изобрела векторные частотники, преобразившие промышленность до неузнаваемости.
Стоимость всех деталей самодельного инвертора существенно ниже цены заводского устройства.
Такие самодельные устройства хорошо подходят для электромоторов мощностью до 0,75 кВт.
Для чего предназначен инвертор — его принцип действия
Инвертор действует на частоту вращения асинхронных моторов. Моторы переделывают электроэнергию в механическое движение. Вращательное движение преобразуется в движения механические. Это создает большое удобство. Асинхронные моторы очень популярны во многих сторонах жизни людей.
Обороты электродвигателя можно изменять и другими устройствами. Но, у них много недостатков. Они сложны в пользовании, дорого стоят, работают с плохим качеством, разбег регулировки маленький.
Частотный преобразователь для мотора с тремя фазами легко решает эту проблему. Все знают, что пользование частотниками для изменения частоты вращения есть самый хороший и правильный метод. Такой аппарат дает мягкий пуск и торможение, а также контролирует многие процессы, происходящие в моторе. Аварийные ситуации при этом сводятся на нет.
Чтобы плавно и быстро регулировать работу двигателя, специалисты разработали специальную электрическую схему. Использование в работе частотника дает возможность работать двигателю без перерыва, экономично. Коэффициент полезного действия его достигает 98%. Это происходит за счет повышения частоты коммутации. Механические устройства не могут выполнить такие функции.
Как регулировать скорость инвертором?
Как частотник может изменять частоту вращения трехфазного электромотора? Сначала он меняет напряжение сетевое. Далее, из него получается нужная амплитуда и частота напряжения, поступает на электромотор.
Разбег интервала регулирования скорости преобразователем большой. Можно изменять вращение мотора в другую сторону. Чтобы двигатель не вышел из строя, нужно брать во внимание данные из его характеристики, допускаемые обороты, мощность.
Из чего состоит привод регулирования?
Схема частотника.
Он имеет в составе три звена:
- выпрямитель, дающий потенциал постоянного тока при включении к питанию электрической сети. Сеть может быть управляемой или нет;
- фильтрующий элемент, который сглаживает выходное напряжение (применяется емкость);
- инвертор, который производит нужную частоту потенциала, крайнего звена возле электромотора.
Режим управления частотников
Их делят на виды управления оборотами двигателя:
- скалярное управление (нет связи с обратной стороны);
- режим векторного управления (связь с обратной стороны имеется, или отсутствует).
В первом случае управляется статор с его магнитным полем. Управление вектором учитывает действие полей магнита ротора и статора, улучшается крутящий момент при разных скоростях вращения. Это и есть основное различие их режимов управления.
Способ векторов точнее и эффективнее. Обслуживать его дороже. Он больше подходит для специалистов с хорошими профессиональными умениями и знаниями. Метод управления скалярного типа наиболее прост в работе. Применяется он с выходными параметрами, не требующими регулировки особой точности.
Как подключить инвертор треугольником и звездой?
Когда мы купили инвертор по недорогой цене, то возникает необходимость: подключение его к электромотору самому без специалистов. Сначала надо установить для безопасности автоматический выключатель для обесточивания. Если возникнет короткое замыкание на фазах, то отключится вся система.
Подключить частотник к мотору можно звездой или треугольником.
Когда привод регулирования с одной фазой, то контакты электромотора присоединяют треугольником. Тогда мощность не потеряется. Мощность этого преобразователя частоты будет не более 3 кВт.
Инверторы с тремя фазами технически наиболее современны. Они питаются от заводских трехфазных сетей, подключаются звездой.
Для ограничения тока пуска и уменьшения момента пуска при пуске электромотора свыше 5 кВт можно использовать способ включения треугольник и звезда.
При включении статора применяется схема звезды, а если обороты двигателя нормальные, то переходят на вариант треугольника. Но это используется при существовании возможности соединения по двум схемам.
Отмечаем, что в варианте звезда-треугольник большие перепады тока будут всегда. При переключении на вторую схему обороты двигателя сильно снизятся. Для восстановления скорости вращения надо повысить силу тока.
Большой применяемостью оказывают пользу частотники для моторов мощностью до 8 кВт.
Применение инверторов нового поколения
Современные частотные преобразователи делаются с применением таких устройств как микроконтроллеры. Это значительно повышает функции инверторов в алгоритмах управления и контролирования с точки зрения безопасности работ.
Частотники имеют успешное применение в областях производства:
- в водоснабжении, снабжении теплом при изменении скорости подачи помпы холодного и горячего водоснабжения;
- в заводских условиях машиностроения;
- в легкой и текстильной промышленности;
- в энергетике и производстве топлива;
- для насосов канализации и скважин;
- в технологических процессах для автоматики управления.
Чтобы управлять и контролировать частотники изготовитель прибора предлагает созданную программу, которая будет всегда иметь связь с контроллером посредством порта, будет показывать на мониторе состояние и позволит производить управление. Данные документируются протоколом обмена и используются пользователями, создающими программы управления для электронной техники и контроллеров.
Данные обмениваются в три этапа:
- Идентификация.
- Инициализация.
- Управление и контроль.
Стоимость блоков питания бесперебойного напряжения имеет зависимость от того, есть ли в нем частотный преобразователь. За такими устройствами будущее. Отрасли экономики и энергетики будут быстрее развиваться благодаря новым современным устройствам.
Источник: http://chistotnik.ru/chastotnik-svoimi-rukami-lyubitelskaya-sxema-preobrazovatelya.html
Частотный привод 5-200Гц (10-400Гц) своими руками
В данной статье речь пойдет о частотном преобразователе, в простонародье, частотнике. Данный частотник, а в дальнейшем частотный привод, способен управлять 3-х фазным асинхронным двигателем.
В данном частотном приводе (ЧП) я использую интеллектуальныйсиловой модуль компании International Rectifier, а конкретно IRAMS10UP60B (на AliExpress), единственное, что с ним сделал, это перегнул ножки, так что, по сути, модуль получился IRAMS10UP60B-2. Выбор на данный модуль пал преимущественно из-за встроенного драйвера.
Главной особенностью встроенного драйвера является возможность использования 3 ШИМ вместо 6 ШИМ каналов. Кроме того цена на данный модуль на eBay около 270 рублей. В качестве управляющего контроллера использую ATmega48.
Разрабатывая данный привод я делал упор на эффективность конструкции, минимальную себестоимость, наличие необходимых защит, гибкость конструкции. В результате получился частотный привод со следующими характеристиками (функциями):
- Выходная частота 5-200Гц
- Скорость набора частоты 5-50Гц в секунду
- Скорость снижения частоты 5-50Гц в секунду
- 4-х фиксированная скорость (каждая из которых от 5-200Гц)
- Вольт добавка 0-20%
- Две «заводских» настройки, которые всегда можно активировать
- Функция намагничивания двигателя
- Функция полной остановки двигателя
- Вход для реверса (как без него)
- Возможность менять характеристику U/F
- Возможность задания частоты с помощью переменного резистора
- Контроль температуры IGBT модуля (сигнализация в случае перегрева и остановки привода)
- Контроль напряжения DC звена (повышенное-пониженное напряжение DC звена, сигнализация и остановка привода)
- Пред заряд DC звена
- Максимальная мощность с данным модулем 750вт, но крутит и 1.1кв на моем ЧПУ
- Все это на одной плате размером 8 х 13 см .
На данный момент защита от сверх тока или кз не реализованы (считаю нет смысла, хотя, свободную ногу в МК с прерыванием по изменению оставил)
Собственно, схема данного девайса .
- Проект в layout
- Ниже фото того, что у меня получилось

Печатная плата данного девайса (доступна в lay под утюг)
На данном фото полностью рабочий экземпляр, проверенный и обкатанный (не имеет панельки расположен слева). Второй для теста atmega 48 перед отправкой (расположен справа) .
Алгоритм работы устройства
Изначально МК (микроконтроллер) является настроенным на работу с электродвигателем номинальным напряжением 220В при частоте вращающего поля 50Гц (т.е. обычный асинхронник, на котором написано 220в 50Гц). Скорость набора частоты установлена на уровне 15Гц/сек.(т.е. разгон до 50 гц займет чуть более 3 сек., до 150 Гц-10 сек ).
Вольт добавка установлена на уровне 10 %, длительность намагничивания 1 сек. (постоянная величина неизменна ), длительность торможения постоянным током 1 сек. (постоянная величина неизменна). Следует отметить ,что напряжение при намагничивании, как и при торможении, является напряжением вольт добавки и меняется одновременно. К слову, преобразователь частоты является скалярным, т.е.
с ростом выходной частоты увеличивается выходное напряжение.
После подачи питания происходит заряд емкости dc звена. Как только напряжение достигает 220В (постоянное ) с определенной задержкой включается реле предзаряда и загорается единственный у меня светодиод L1. С этого момента привод готов к запуску. Для управления частотником имеется 6 входов:
- Вкл (если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5Гц)
- Вкл+реверс(если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5Гц, но в другую сторону)
- 1 фиксированная частота (задается R1)
- 2 фиксированная частота (задается R2)
- 3 фиксированная частота (задается R3)
- 4 фиксированная частота (задается R4)
В этом управлении есть одно Но. Если в процессе вращения двигателя менять задание на резисторе, то оно изменится лишь после повторной подачи команды (вкл.) или (вкл+реверс.). Иначе говоря, данные с резисторов читаются пока отсутствуют эти два сигнала.
Если планируется регулировать скорость с помощью резистора в процессе работы, то необходимо установить джампер J1.В этом режиме активен лишь первый резистор, причем резистор R4 ограничивает максимальную частоту, то есть если его выставить на 50% (2.5 вольта 4 «штырь».
на фото ниже 5 земля), то частота R1 будет регулироваться резистором от 5 до 100Гц.
Для задании частоты вращение нужно учитывать, что 5v на входе в МК соответствует 200Гц., 1v-40Гц, 1.25v-50Гц и т.д. Для измерения напряжение предусмотрены контакты 1-5, где 1-4 соответствуют номерам резисторов, 5- общий минус(на фото ниже). Резистор R5 служит для подстройки маштабирования напряжения DC звена 1в -100в (на схеме R30).
Внимание! Плата находится под напряжением опасным для жизни. Входа управления развязаны оптопарами.
Особенности настройки
Настройка привода перед первым включением сводится к проверке монтажа электронных компонентов и настройки делителя напряжения для DC звена (R2).
100 Вольтам DC звена должно соответствовать 1 вольт на 23 (ножке МК)- это ВАЖНО!!!!….На этом настройка завершена…
Перед подачей сетевого напряжения необходимо промыть плату (удалить остатки канифоли) со стороны пайки растворителем или спиртом, желательно покрыть лаком.
Привод имеет «заводские » настройки, которые подходят как для двигателя с напряжением 220В и частотой 50Гц), так и для двигателя с напряжением 380в и частотой 50гц. Данные настройки всегда можно установить если вы не решаетесь сами настраивать привод. Для того чтобы установить «заводские » настройки для двигателя (220в 50Гц) :
- Включить привод
- Дождаться готовности (если подано питание только на МК , просто подождать 2-3 секунды)
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод L1 не начнет мигать, отпустить кнопку В1
- Подать команду выбора 1 скорости. Как только светодиод перестанет мигать, убрать команду
- Привод настроен . В зависимости от того …………………….светодиод горел (если не горел, то привод ожидает напряжения на DC звене).
При такой настройке автоматически в записываются следующие параметры:
- Номинальная частота двигателя при 220В — 50Гц
- Вольт добавка (напряжение намагничивания, торможения ) — 10%
- Интенсивность разгона 15Гц./сек
- Интенсивность торможения 15Гц./сек
Если подать сигнал выбора второй скорости, то в EEPROM запишутся следующие параметры (разница лишь в частоте):
- Номинальная частота двигателя при 220В- 30Гц
- Вольт добавка (Напряжение намагничивания, торможения ) 10%
- Интенсивность разгона 15Гц./сек
- Интенсивность торможения 15Гц./сек
Наконец, третий вариант Настройки:
- Нажать на кнопку В1 и держать
- Дождаться, когда светодиод начнет мигать
- Отпустить кнопку В1
- Не подавать напряжение на входа выбора 1-ой или 2-ой скорости
- Задать параметры подстроечными резисторами
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод не начнет моргать
Таким образом, до тех пор, пока светодиод мигает, привод находится в режиме настройки. В этом режиме при подаче входа 1-ой или 2-ой скорости в EEPROM записываются параметры. Если не подавать напряжение на входа выбора 1-ой или 2-ой скорости, то фиксированные параметры в EEPROM не запишутся, а будут задаваться подстроечными резисторами.
- Резистор задает номинальную частоту двигателя при 220 В ( Так, например, если на двигателе написано 200Гц /220 то резистор нужно выкрутить на максимум; если написано 100Гц/ 220в нужно добиться 2.5 Вольта на 1-ом контакте. (1Вольт на первом контакте соответствует 40Гц); если на двигателе написано 50Гц/400В то нужно выставить 27Гц/0,68 В (например:(50/400)*220=27Гц )так, как нам необходимо знать частоту двигателя при 220В питания двигателя. Диапазон изменения параметра 25Гц — 200Гц.(1 Вольту на контакте 1-ом соответствует 40 Гц)
- Резистор отвечает за вольт добавку. 1 Вольт на 2-ом контакте соответствует 4% напряжения вольт добавки (мое мнение выбрать на уровне 10% то есть 2.5 вольта повышать с осторожностью) Диапазон настройки 0-20% от напряжения сети (1 Вольту на контакте 2-ом соответствует 4%)
- Интенсивность разгона 1 В соответствует 10Гц/сек (на мой взгляд оптимально 15 -25 Гц/сек) Диапазон настройки 5Гц/сек — 50Гц/сек. (1 вольту на контакте 3-ом соответствует 10 Гц/сек)
- Интенсивность торможения 1 В соответствует 10Гц/сек (на мой взгляд оптимально 10 -15 Гц/сек) Диапазон настройки 5Гц/сек — 50Гц/сек. (1 вольту на контакте 4-ом соответствует 10 Гц/сек)
После того, как все резисторы выставлены нажимаем и держим кнопку В1 до тех пор пока светодиод не перестанет мигать!!!! Если светодиод моргал и загорелся, то привод готов к запуску.Если светодиод моргал и НЕ загорелся, то ждем 5 секунд, и только потом отключаем питание от контроллера.
Ниже представлена вольт-частотная характеристика устройства для двигателя 220в 50Гц с вольт добавкой в 10 % .
- Uмах- максимальное напряжение, которое способен выдать преобразователь
- Uв.д.- напряжение вольт добавки в процентах от напряжении сети
- Fн.д.- номинальная частота вращения двигателя при 220В . ВАЖНО
- Fmax- максимальная выходная частота преобразователя.
Еще один пример настройки
Предположим, у вас имеется двигатель, на котором указана номинальная частота 50Гц , номинальное напряжение 80В, Чтобы узнать какая будет номинальная частота при 220В необходимо: 220 В разделить на номинальное напряжение и умножить на номинальную частоту (220/80*50=137Гц). Таким образом, мы получим,что напряжение на 1 контакте (резисторе) нужно выставить 137/40=3,45 В.
Симуляция в протеусе разгон 0-50Гц одной фазы (на 3-х фазах зависает комп )
Как видно из скриншота с ростом частоты увеличивается амплитуда синуса. Разгон занимает примерно 3.1 сек.
По поводу питания
Рекомендую использовать трансформатор, так как это самый надежный вариант. На моих тестовых платах нет диодных мостов и стабилизатора для igbt модуля 7812.
Для скачивания доступны две печатные платы. Первая та которая представлена в обзоре. Вторая имеет незначительные изменения, добавлен диодный мостик и стабилизатор.
Защитный диод ставить обязательно P6KE18A или 1.5KE18A ставить обязательно.
Пример размещения трансформатора, как оказалось найти совсем нетрудно.
Какой двигатель можно подключить к данному преобразователю частоты?
Все зависит от модуля. В принципе можно подключить любой, главное, чтобы его сопротивление для модуля irams10up60 было более 9 Ом. Нужно учесть, что модуль irams10up60 рассчитан на маленький импульсный ток и имеет встроенную защиту на уровне 15 А Этого очень мало.
Но для двигателей 50Гц 220В 750 Вт, этого за глаза. Если у вас высокооборотистый шпиндель, то скорее всего он имеет маленькое сопротивление обмоток. Данный модуль может пробьет импульсным током.
При использовании модуля IRAMX16UP60B (ножки придется загнуть самостоятельно) мощность двигателя по даташиту возрастает с 0.75 до 2.2 КВт.
Главное у данного модуля: ток короткого замыкания 140А против 47А, защита настроена на уровне 25А. Какой модуль использовать решать вам. Нужно помнить что на 1 кВт необходимо 1000мкФ емкости dc звена.
По поводу защиты от КЗ. Если у привода сразу после выхода не ставить сглаживающий дроссель (ограничивает скорость нарастания тока) и коротнуть выход модуля, то модулю придет «хана». Если у вас модуль iramX, шансы есть. А вот с IRAMS шансов ноль, проверено.
Программа занимает 4096 кБ памяти из 4098. Все сжато и оптимизировано под размер программы по максимум. Время цикла есть фиксированная величина равная 10мс.
- На данный момент всё вышеописанное работает и испытано.
- Если использовать кварц на 20МГц, то привод получится 10-400Гц; темп разгона 10-100Гц/сек; частота ШИМа возрастет до 10кГц; время цикла упадет до 5мс.
- Забегая вперед следующий частотный преобразователь будет реализован на ATmegа64, иметь разрядность ШИМ не 8, а 10 Бит, иметь дисплей и множество параметров.
Ниже смотрите видео настройки привода, проверки защиты перегрева, демонстрации работы (использую двигатель 380В 50Гц, а настройки для 220В 50Гц). Так сделал специально, чтобы проверить как работает ШИМ с минимальным заданием.)
В свободном доступе прошивке не будет, НО запрограммированный контролер ATmega48-10pu или ATmega48-20pu будет дешевле mc3phac. Готов ответить на все ваши вопросы.
Заказ прошитого контроллера
Скачать список элементов (PDF)
Прикрепленные файлы:
- сила с мозгами V1_2(1).lay (126 Кб)
- сила с мозгами V1_2_1.lay (134 Кб)
Источник: https://cxem.net/promelectr/promelectr27.php
Частотные преобразователи своими руками. Схема и принцип работы частотного преобразователя :
Впервые асинхронный двигатель был использован в конце 19-го века. Его успешное применение позволило внедрить данное оборудование практически на любой завод, фабрику, в любую отрасль промышленности.
Однако управлять данным устройством оказалось довольно проблемно, особенно пуском и остановкой.
Основной целью эксплуатации частотного преобразователя, а также целью его создания как раз и стала необходимость в устройстве, управляющем асинхронным двигателем.
Общая информация
Целесообразнее всего снабжать преобразователем частоты (ЧП) те устройства, которые обладают довольно высоким показателем мощности. Основная цель, для которой используется такое оборудование, — это изменение пускового тока. ЧП дает возможность задавать величину для этого параметра, что и обеспечивает более плавную остановку и запуск двигателя.
Также можно отметить, что эти два устройства, работающие в паре, позволяют заменить такие устройства, как электроприводы постоянного тока. С одной стороны, регулировать скорость у такой системы очень просто, однако есть и слабое место в такой сети — сам электродвигатель.
В электроприводах постоянного тока именно это устройство является наиболее дорогим и ненадежным.
А если сравнивать асинхронное оборудование с прибором постоянного тока, то тут можно выделить явные преимущества: более простое и надежное устройство; масса, стоимость и габариты асинхронного приспособления будут гораздо ниже, чем у аппарата постоянного тока с той же мощностью.
Что такое частотный преобразователь
Стоит сказать о том, что регулировать числовое значение тока можно и вручную. Однако на это будет уходить определенное количество времени, так как человек не способен моментально среагировать на любое изменение, как машина. А это приведет к тому, что некоторое количество энергии будет уходить впустую, а энергетический ресурс двигателя выработается быстрее.
Частотный преобразователь для электродвигателя — это практически необходимая деталь, так как те устройства, которые не имели его, обладали значением тока, превышающим номинальное значение напряжение в 5-7 раз. Такая разница не позволит создавать приемлемые условия для эксплуатации двигателя.
Принцип работы частотного преобразователя кроется в том, что в нем используется специальный электронный механизм, который и управляет работой асинхронного двигателя. Также важно отметить, что ЧП позволяет не только настроить плавный запуск, но и выбрать оптимальный показатель между напряжением и частотой. Эта характеристика рассчитывается по определенной формуле.
Основное преимущество применения частотного преобразователя для двигателя — это экономия электрической энергии, значение которой доходит до 50 %. Еще одно важное преимущество ЧП — это возможность настроить его работу так, чтобы она максимально подходила под каждую отрасль производства. Применение такого устройства основывается на принципе работы двойного преобразования напряжения.
Первый этап — это регулировка напряжения, поступающего из сети. Оно выпрямляется и фильтруется. Эти операции осуществляются посредством системы конденсаторов.
Второй этап — включение в работу электронного управления системой. Этот элемент выставляет значение тока, которое будет соответствовать частоте, а также ранее выбранному режиму работы.
Как можно заметить, принцип работы частотного преобразователя довольно прост.
Материалы для сборки
На сегодняшний день распространение и улучшение технологий и оборудования привело к тому, что, имея некоторые знания в электронике и умения, можно собрать ЧП для однофазного двигателя собственноручно.
Для того чтобы собрать это устройство, понадобятся такие материалы, как:
- драйвер трехфазного моста модели IR2135 или 2133;
- понадобится микроконтроллер, который будет использоваться как генератор PWM, модели AT90SPWM3B;
- еще одна важная деталь — программатор;
- три пары транзисторов;
- жидкокристаллический индикатор;
- шесть кнопок для управления системой.
Сборка устройства
Для начала работы необходимо иметь схему частотного преобразователя. Осуществлять сборку будет намного удобнее и быстрее, имея этот документ.
Первый шаг сборки — соединение обмоток двигателя. Для этого нужно использовать вариант подключения, который в электротехнике называется треугольник.
В сборке частотного преобразователя своими руками основой будут выступать две платы. Одна из них (первая) будет являться основой для размещения таких элементов, как блок питания, драйвер, транзисторы.
Силовые клеммы также будут подключаться к этой плате. Вторая же плата необходима для крепления микроконтроллера и индикатора. Для того чтобы соединить эти два элемента между собой, нужно использовать гибкий шлейф.
Чтобы изготовить импульсный блок, можно использовать самую простую схему.
Для того чтобы осуществлять контроль над работой двигателя, нет необходимости в добавлении внешних устройств. Однако если такое желание все же есть, то можно добавить схему IL300 в конструкцию.
Следующим важным элементом в сборке частотного преобразователя своими руками станет общий радиатор. В схеме этих устройств данный элемент используется для того, чтобы разместить на нем транзисторы и диодный мост. Один из обязательных шагов — это установка оптронов ОС2-4. Основное предназначение этих элементов — дублирование кнопок управления.
При изготовлении частотного преобразователя своими руками для двигателя с мощностью до 400 Вт можно обойтись без термодатчика. Для того чтобы измерять напряжение, можно использовать обычный усилитель (DA-1-2). Необходимо также защитить все кнопки управления. Для этого используются пластиковые толкатели. Управление устройством осуществляется при помощи опторазвязки.
Последнее, что необходимо сделать при изготовлении частотного преобразователя своими руками, — это позаботиться о подавлении помех. Это необходимо делать лишь в том случае, если в системе используются слишком длинные провода. Когда ротор двигателя уже запущен, то можно выбрать любою скорость вращения, которая лежит в пределах частоты от 1 до 40.
Подключение
Собрать ЧП — это лишь половина дела. Вторая половина — это правильное подключение преобразователя к двигателю. Частотный преобразователь для насоса, работающего посредством использования асинхронного двигателя, может подключаться по двум методам. Выбор метода зависит от напряжения сети.
Если она обладает напряжением в 220 В и всего одной фазой, то наиболее выгодная схема подключения — это треугольник. Тут важно запомнить одну вещь. Выходной ток не может превышать номинальный более чем на 50 %.
Если подключать частотный преобразователь на 380 В и трех фазах, то для подсоединения к двигателю лучше всего прибегнуть к такой схеме, как звезда. Для того чтобы максимально упростить этот процесс, на покупных ЧП имеются специальные клеммы, которые обладают нужной маркировкой. На самодельном придется обойтись без этого.
Важно не забыть, что в любой системе, самодельной или покупной, должна быть схема, имеющая клемму для заземления.
Обслуживание устройства
Как уже говорилось ранее, просто собрать ЧП и подключить его — мало. Еще одна важная часть, которая гарантирует длительный срок службы устройства, — это обслуживание прибора. Частотный преобразователь для насоса, двигателя или любого другого устройства, должен подвергаться тщательному уходу:
- Наиболее страшный враг электронного оборудования — это пыль. Важно следить, чтобы на внутренних контактах она не скапливалась. Для удаления этих частиц мусора можно использовать компрессор с невысокой мощностью. Пылесос использовать нежелательно, так как он не сможет убрать плотный слой пыли.
- Необходимо регулярно проверять работоспособность всех узлов. При возникновении неполадок сразу их менять. Нормальный срок эксплуатации электролитического конденсатора — 5 лет, для предохранителя — 10 лет. Вентиляторы, работающие внутри устройства, нужно менять каждые 2-3 года, внутренние шлейфы — каждые 6 лет.
- Очень важно следить за такими параметрами, как температура внутренних элементов, а также напряжение на шине постоянного тока. Если температура повысится слишком сильно, то термопаста с большой долей вероятности высохнет, что приведет к выходу из строя конденсаторов. Чтобы избежать этой проблемы, рекомендуется менять термопасту каждые три года.
- Важно соблюдать следующие правила эксплуатации: температура окружающего воздуха не выше +40 градусов; помещение должно быть сухим, повышенная влажность недопустима; повышенная запыленность также отрицательно скажется на приборе.
Структурное устройство ЧП
Для того чтобы точно ответить на вопрос, как сделать частотный преобразователь, необходимо разобраться еще в одном пункте. Это — структурное устройство данного прибора.
Так как ориентироваться при изготовлении нужно на покупные модели, то и схема должна быть соответствующей. А это значит, что работать он должен на структуре двойного преобразования. У этой схемы имеются основные части: звено постоянного тока, силовой импульсный инвертор и система управления.
Если рассматривать более детально, то часть с постоянным током состоит из двух соединений: неуправляемый выпрямитель и фильтр. Именно в этом элементе переменное напряжение, которое действует в сети, будет преобразовываться в постоянное.
Второй элемент — силовой импульсный инвертор. Он является трехфазным, а состоит из шести транзисторных ключей.
Они предназначены для подключения соответствующей обмотки двигателя к каждому из ключей как положительному, так и отрицательному.
Этот элемент отвечает за преобразование поступающего постоянного напряжения в трехфазное и переменное. Также это устройство задает нужную частоту и амплитуду.
Последний элемент — это система управления. Здесь используются силовые IGBT-транзисторы. Если сравнивать с обычными тиристорами, то частота переключения у транзисторов выше. Это позволяет вырабатывать выходной сигнал в форме синусоиды с минимальным искажением.
Частотные преобразователи на микроконтроллере
Принцип работы таких устройств является следующим. Изначально характеристики всех микроконтроллеров (МК) настраиваются так, чтобы работать в паре с напряжением в 200 В, а также частотой поля в 50 Гц. Другими словами, они настроены по умолчанию для работы в паре с наиболее примитивными асинхронными двигателями 220 В/50 Гц.
Также имеется такой показатель, как скорость набора частоты. По умолчанию это значение устанавливается как 15 Гц/сек. Это означает, что разгон МК до 50 Гц будет занимать чуть более чем 3 секунды, а, к примеру, до 150 Гц за 10 секунд ровно. Также важно отметить, что изначально ЧП является скалярным.
Другими словами, чем выше будет выходная частота двигателя, тем выше будет его напряжение.
Ремонт и наладка прибора
Ремонт частотных преобразователей — неотъемлемая часть работы с этими устройствами. Довольно часто случается такая проблема, как выход из строя тормозного резистора. Если это происходит, то ЧП не сможет работать на полную мощность.
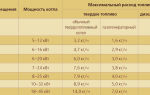
Для того чтобы установить, вышел ли из строя тормозной элемент или нет, имеется таблица, в которой приведены все номинальные значения для всех типов элементов.
Если после сверки с этим документом выяснилось, что какой-либо параметр не совпадает, то резистор нужно менять.
Также могут быть сбои в том случае, если ЧП оказался слишком мощным или же сеть слишком слабая для этой модели. Тут дело заключается в принципе работы элементов ЧП. Он рассчитан на эксплуатацию при постоянном высоком напряжении.
Если параметры сети не дотягивают до минимальных показателей, требуемых для работы, то и выполнять свои функции он не сможет. Как таковой ремонт частотного преобразователя тут не требуется, необходимо купить менее мощный прибор.
Основные показатели преобразователей
К основным характеристикам этих устройств можно отнести следующее:
- рабочее напряжение в пределах от 220 до 480 В;
- все модели обладают защитой lP54;
- температурный режим, требуемый для нормальной эксплуатации, в пределах от +10 до +40 градусов по Цельсию;
- мощность для большинства покупных моделей — от 1 кВт.
Кроме того, существуют такие модели, как двухзвенные частотные преобразователи, а также такие разновидности, как матричные и векторные устройства.
К примеру, векторный тип — это ЧП переменного тока и напряжение, которое подается на него, необходимое для создания нужной амплитуды. Этот тип прибора обеспечивает включение в работу двигателя спустя 2 секунды после запуска ЧП.
Однако недостатком стало то, что он довольно дорогой, а потому его популярность стремительно падает.
Очень важно заметить, что подбирать просто мощный прибор — это неправильно. Выбор должен осуществляться в соответствии с рабочими параметрами сети. Если купить слишком мощный частотный преобразователь для электродвигателя, то получится, что будет переплата за то оборудование, которое будет представлять угрозу, а не регулировать работу агрегата.
Источник: https://www.syl.ru/article/360929/chastotnyie-preobrazovateli-svoimi-rukami-shema-i-printsip-rabotyi-chastotnogo-preobrazovatelya
Частотный преобразователь своими руками
Частотный преобразователь своими руками – представляю вам небольшую статью о асинхронном двигателе и частотном преобразователе, который мне ранее приходилось делать.
Вот и теперь потребовался хороший привод для циркулярной пилы.
Конечно можно было бы взять в магазине фирменный частотник, но все-таки вариант самостоятельного изготовления оказался для меня наиболее приемлемым.
К тому же, качество регулировки скорости привода пилорамы не требовало абсолютной точности. Однако с нагрузками ударного типа и длительными перегрузками он должен справляться. К тому же хотелось сделать управление наиболее простым, без всяких там параметров, а просто установить пару кнопок.
Главные преимущества привода с регулировкой частоты:
- Создаем из однофазного напряжения 220v полновесные три фазы 220v, сдвиг у которых будет 120°, при этом получаем абсолютный вращательный момент с мощностью на валу
- Повышенный момент старта с плавным запуском без максимального пускового тока
- Нет сильного замагничивания и излишнего перегрева мотора, как это бывает когда применяются конденсаторы
- При необходимости можно свободно управлять скоростью вращения и менять направление
Ниже показана принципиальная схема устройства:
Трехфазный мост выполнен на гибридных IGBT транзисторах c диодами обратной проводимости.
В целом это представляет собой бустрепное управление микроконтроллером PIC16F628A, осуществляемое с помощью специализированных оптодрайверов HCPL-3120.
Во входном тракте установлен конденсатор гашения напряжения, выполняющего функцию мягкой зарядки электролитических конденсаторов в цепи постоянного напряжения.
Быстродействующая защита
Далее по схеме он зашунтирован электромагнитным реле, при этом на PIC16F628A подается цифровой логический уровень готовности. В схеме предусмотрена быстродействующая защита по току от короткого замыкания и критической перегрузке мотора, выполненная по триггерной схеме. Все это управляется при помощи двух кнопок и одного переключателя, который изменяет направление вращения вала.
Схема усилителя звука
Частотный преобразователь своими руками, в частности участок силовых напряжений был собран методом навесного монтажа, а контроллер размещен на печатной плате, которая показана ниже:
Постоянные резисторы с номиналом 270к, шунтирующие конденсаторы установленные в цепи затвора IGBT, запаял со стороны дорожек, так как упустил из виду сделать для них площадки. Их конечно можно заменить на smd.
- Здесь показано фото печатной платы контроллера после распайки компонентов:
- А это с противоположной стороны
- Для подачи напряжения питания в модуль управления был изготовлен стандартный обратноходовой импульсный источник питания.
Принципиальная схема блока питания:
Чтобы изготовить частотный преобразователь своими руками в принципе можно использовать практически любой источник питания с выходным напряжением 24v.
Однако, этот блок питания должен быть стабилизированный и с задержкой напряжения на выходе с момента исчезновения напряжения сети, хотябы в пределах 3-х секунд. Это обусловлено тем, что двигатель смог отключится в случае возникновения ошибки по DC.
Достигается подбором электролитического конденсатора С1 с большим значением емкости.
Ну, а теперь нужно подробнее разобраться в самом важном компоненте данного устройства – в программе микроконтроллера.
В интернете подходящей для меня информации по этому вопросу я не нашел, хотя были предложения установить специальные фирменные контроллеры. Но как я уже говорил, мне принципиально нужно было установить, что-то собственной разработки.
Приступил во всех подробностях анализировать ШИМ модуляцию, в какое время и каким способом открыть определенный транзистор…
Программа формирования задержек
Выяснились некоторые закономерности и получился образец несложной программы формирования задержек.
При ее использовании получается произвести достаточно хорошую синусоидальную ШИМ с возможностью изменять напряжение.
Естественно контроллер делать какие либо вычисления не успевал, задержки не давали того эффекта, который был нужен. Следовательно, такой вариант обсчитывания ШИМ на микроконтроллере PIC16F628A я забраковал сразу.
В результате образовалась констант матрица, а ее уже отрабатывал PIC16F628A. Они формировали и диапазон частоты и напряжение питания. Конечно эта работа по созданию данного устройства несколько затянулась.
Циркуляркой уже полным ходом пилили на конденсаторах, когда появился необходимый вариант прошивки. Первоначально тестировал схему на моторе от вентилятора, мощностью 180 Вт.
Вот фото прибора на стадии экспериментальных работ:
Тестирование устройства
Чуть позже, в процессе испытания программа подвергалась усовершенствованию, а после запуска двигателя мощностью на 4 кВт я практически был удовлетворен итогом своей работы.
Защита от короткого замыкания прекрасно срабатывает, полутора-киловаттный мотор на 1440об/мин с диском 300мм свободно справлялся с приличными брусками. Шкивы были установлены одинаковые, что на двигатель, что на вал циркулярки.
При попадании пилы на сучок сетевое напряжение немного падало, хотя двигатель продолжал работать.
По ходу работы потребовалось немного натянуть ремень, поскольку при увеличении нагрузки он начинал скользить на шкиве. В дальнейшем применили двойную передачу.
Но на этом решил не останавливаться, поэтому сейчас начал усовершенствовать программу, в итоге она будет значительно эффективней.
Принцип работы ШИМ-контролера немного усложняется, появится больше режимов, появится ресурс раскручивания выше номинального значения.
В конце статьи файлы для того самого простого варианта устройства, которое прекрасно работает с циркулярной пилой уже больше года.
Характеристики:
- Частота на выходе: 2,5-50Гц, шаг 1,25Гц; Частота ШИМ-контроллера синхронная, с возможностью изменения. Диапазон частот в пределах 1750-3350Гц.; Скалярное управление частотным преобразователем, мощность мотора около 4кВт. Самая меньшая частота работы при разовом нажатии кнопки “Пуск” – составляет 10Гц.
- Во время удержании кнопки нажатой появляется разгоняющий момент, а когда кнопка отпускается, то частота буде той, до какой смог разогнаться. Частота по максимуму – 50Гц информирует светодиодный индикатор. Номинальное время разгоняющего момента составляет 2 секунды.
- Индикатор “Готов” сообщает о готовности устройства к старту двигателя.
Файлы:
Программа ШИММ1.0r для PIC16F628(A)
Плата управления в SPLANe
Источник: https://usilitelstabo.ru/chastotnyiy-preobrazovatel-svoimi-rukami.html